
This is the start of a flight controller I’m writing.
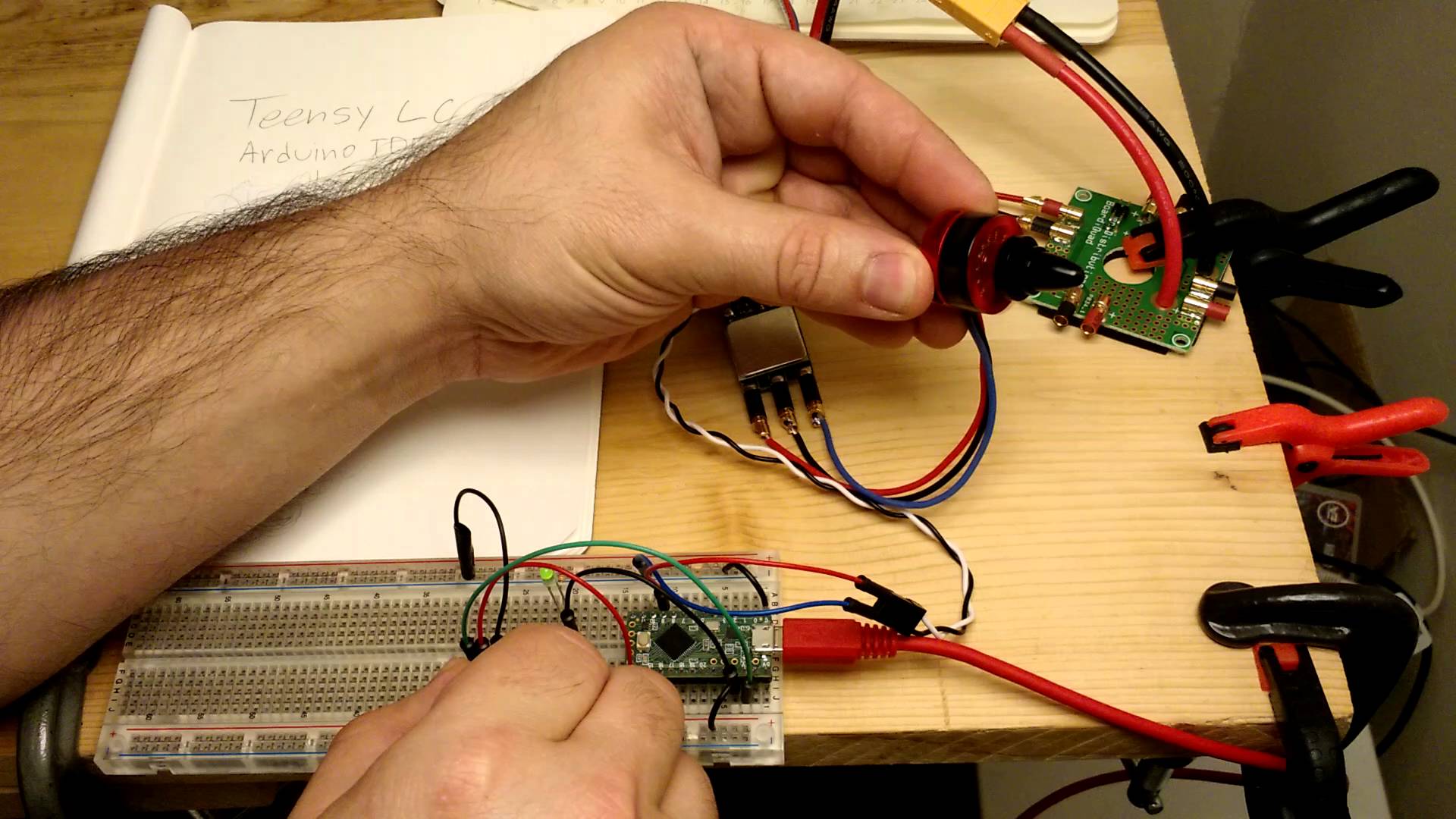
The ESC used here is a Hobbywing X-Rotor 20A, the manual says it can work up to 621hz in high time mode. It’s not clear but it implies that it should work up to 500hz in intermediate/standard timing mode, though the fastest I could get it to accept was ~480hz. I’m using the Arduino IDE on a Teensy LC here. The PMW is output using the analogWrite function.
Dev blog: http://technicalartlead.blogspot.com/2016/03/ma-drone.html
Github: https://github.com/pauljlohman/Pegasus
Share
Custom Flight Controller – PWM at 480hz 16-bit Test00:54
Related Posts

Lost in a Norwegian Forest ?| FPV Freestyle
My friend found this magical place near Oslo (Linderud) with perfect gaps in between …

Hubsan X4 H107C Plus Altitude Hold Micro Camera Drone
This micro quadcopter includes a 2MP 720p HD camera, PLUS an altitude hold system …

Drone Crash Compilation VOL. 9 – Down in FLAMES
Learn from the mistakes of others! #kenheron #dronecrashes #dronefail
![FPV Drone Racing [FR] | WHAT’S UP MONTREAL?](https://quadcoptersource.tesb1.com/wp-content/uploads/2015/12/FPV-Drone-Racing-FR-WHATS-UP-MONTREAL.jpg "FPV Drone Racing [FR] | WHAT’S UP MONTREAL?")
FPV Drone Racing [FR] | WHAT’S UP MONTREAL?
This video is in French Antoine visits the Dronolab FPV Drone Racing competition at …

Sebring Drone Race – Intense Heats || RaceBotFPV
These are my last two heats at the Sebring drone race in Sebring Florida. …

Best of Action ? WRC 2020: Rally Italia Sardegna
Best of Action ? WRC 2020: Rally Italia Sardegna More FREE videos, news and …
{kind=link}