
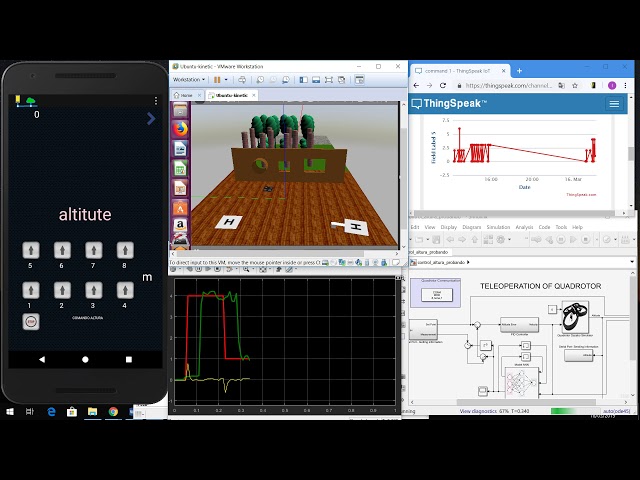
It was developed using Gazebo, Simulink and Thingspeak IoTPlatform
To compensate the time delay effects was used the smith predctor, and sending command through internet (IoT cloud)
Related Posts

◄ Drone Freestyle FPV ►Graffitis Hormigón Bando RAW
Esta semana he estado en una nave que da mucho juego, techos rotos, puertas, …

DJI VIRTUAL FLIGHT FPV SIMULATOR APP | REVIEW
Today im testing the new DJI VIRTUAL SIMULATOR for the DJI FPV drone. This …

Long Range FPV | 5 km round-trip | Total Freedom
Not the best weather or light this day, but absolutely a run I’m happy …
")
How this simple Adapter2 saved the day (SG325 + iNav RTH settings)
While waiting for the Flywoo Explorer LR I converted my Skystars SG325 to have …

ASCEND – 7 inch drone altitude FPV
Chill mid-altitude 7 inch drone flight… 🙂 Enjoy as i did 🙂 Setup: Frame: …

Extreme Barbie Jeep Racing 2018 at Stony Lonesome
The annual Stoney Lonesome Barbie Jeep Race that goes down at Stoney lonesome OHV …
{kind=link}