
This is the start of a flight controller I’m writing.
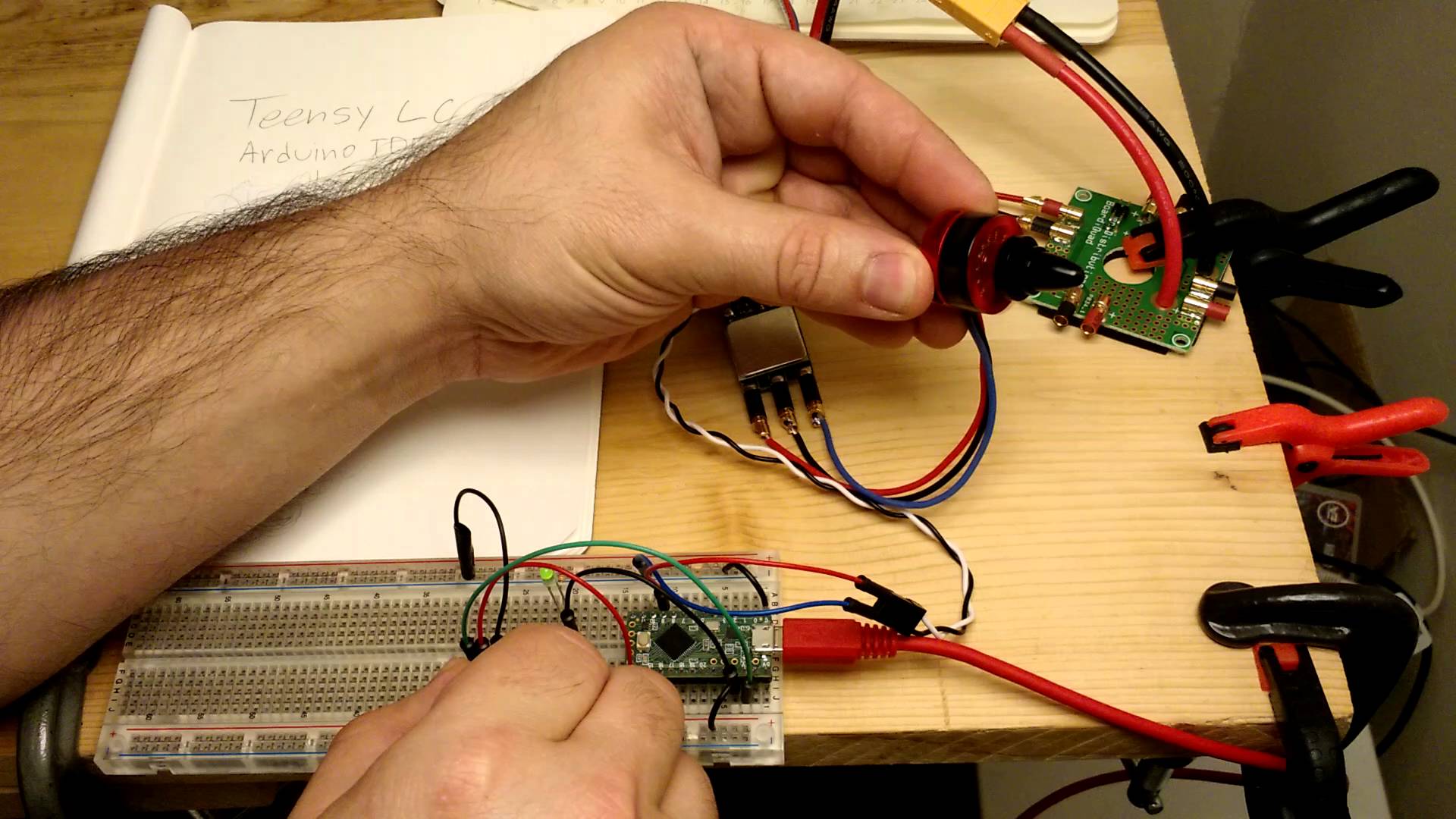
The ESC used here is a Hobbywing X-Rotor 20A, the manual says it can work up to 621hz in high time mode. It’s not clear but it implies that it should work up to 500hz in intermediate/standard timing mode, though the fastest I could get it to accept was ~480hz. I’m using the Arduino IDE on a Teensy LC here. The PMW is output using the analogWrite function.
Dev blog: http://technicalartlead.blogspot.com/2016/03/ma-drone.html
Github: https://github.com/pauljlohman/Pegasus
Share
Custom Flight Controller – PWM at 480hz 16-bit Test00:54
Related Posts

Eachine Wizard Failsafe
EACHINE WIZARD FAILSAFE In this video, Eachine “The Wiz” X220 goes Freestyle, for a …
")
DRONE SYMA X5C RANGE MOD 150+ meters height MESSINA Port and Strait (SUNSET PART 1)
ONBOARD CAMERA DRONE QUADCOPTER FLIGHT TEST IN MESSINA (SICILY) and its beautiful landscape at …

Montage ampoules à led sur Lotus Elise Rover 2002
Tout est dans le titre. Un simple montage d’ampoules led (format CREE – 4800 …

How To Build, Program Fly The FlightOne Megabolt 4 in 1 ESC 🔥
In today’s video we build, program and then fly the all new Megabolt 4 …

Chasing Stock Cars – Lochgelly Raceway
Big thanks to Kevin at Hardie Race Promotions for letting Tom and I come …

You don’t really care about my flying. It’s okay, I understand.
Tmotor 5143 (note: Increase idle RPM to ~6.75% with this prop) https://goo.gl/UbkYVf https://goo.gl/fBPvdp Emax …
{kind=link}