
[Supplementary material for 2020 IEEE RA-L submission with IROS 2020 option]
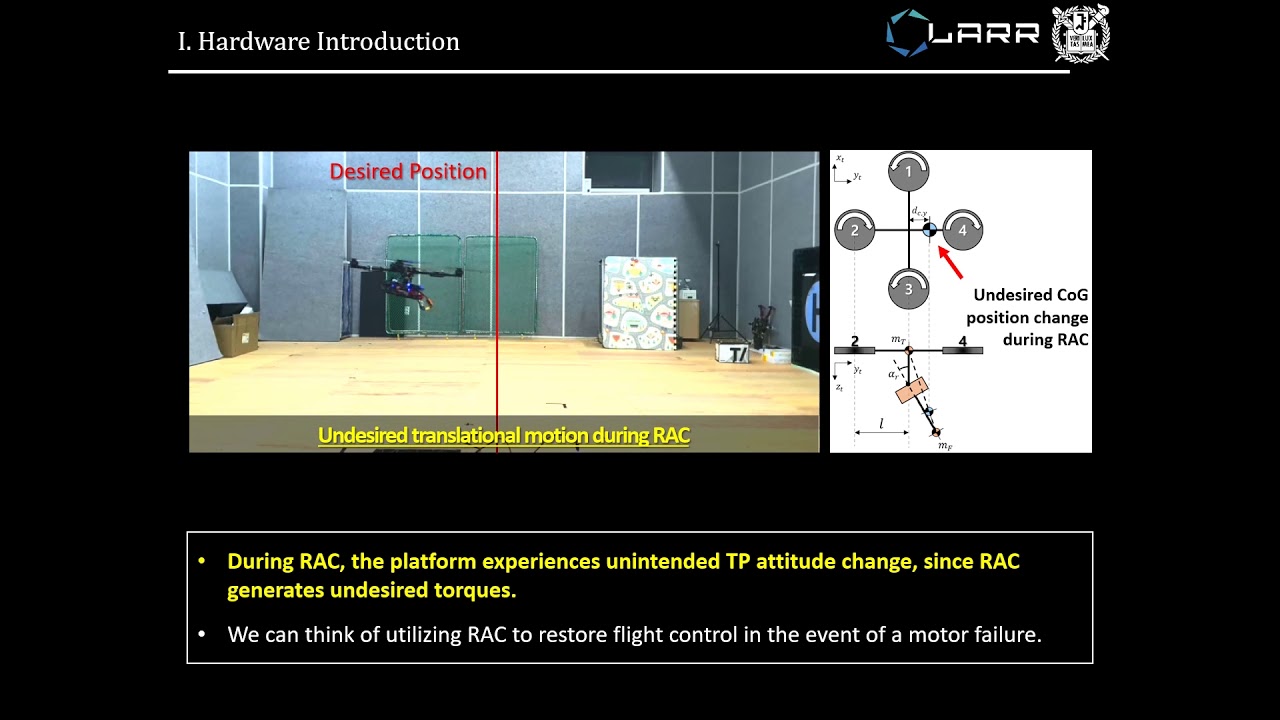
In this research, we introduce a new quadcopter fail-safe flight solution that can perform the same four controllable degrees-of-freedom flight as a regular multirotor even when a single thruster fails. The new solution employs a novel multirotor platform known as theT3-Multirotor and utilizes a distinctive strategy of actively controlling the center of gravity position to restore the nominal flight performance. A dedicated control structure is introduced, along with a detailed analysis of the dynamic characteristics of the platform that change during emergency flights. Experimental results are provided to validate the feasibility of the proposed fail-safe flight strategy.
Paper URL: https://arxiv.org/pdf/2002.11326.pdf
Related Posts

FPV Drone Race Germany 2016 Mainhausen

Ideafly Grasshopper F210 RC Racing Drone

WE FINALLY DOVE THE CHIMNEY leader 3 Vs Baby hawk

EMAX Babyhawk Race Pro 120mm Brushless FPV Racer Flight Test Review

Consi and Open Finals Downhill Skateboarding at IDF Verdicchio Race 2018 – Drone and GoPro footage
![252 – ROBOCAT 270 FPV Racing Drone – “Maiden Flight After Assembly” – [GEARBEST.COM]](https://quadcoptersource.tesb1.com/wp-content/uploads/2016/08/252-ROBOCAT-270-FPV-Racing-Drone-Maiden-Flight-After-Assembly-GEARBEST.COM_.jpg "252 – ROBOCAT 270 FPV Racing Drone – “Maiden Flight After Assembly” – [GEARBEST.COM]")
{kind=link}