
Laboratory of Autonomous Robotics Research (LARR) in Seoul National University is conducting research on actively controlling the position of the center of mass (CoM) of the Quadcopter to generate the high attitude control torque required for improving the agility of the platform’s translational motion.
During our research, however, we have recently learned that CoM location control can completely replace the contribution of a particular motor to the quadrotor’s attitude control.
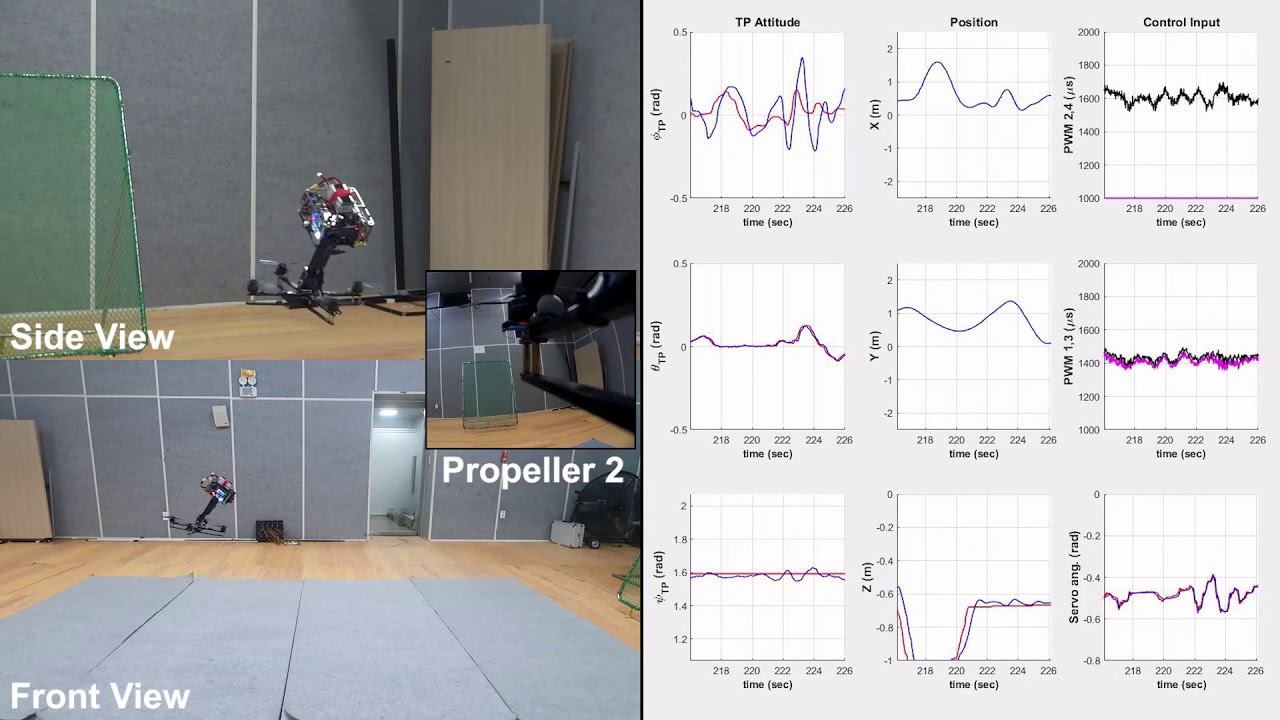
The video shows an experimental result of fail-safe flight in a single motor failure condition, where we can restore all four control inputs (roll, pitch, yaw, thrust) of the multirotor by utilizing the CoM control.
Related Posts

Tarantula 1505 small CHEAP Brushed Speed light weight fast yaw DRONE REVIEW
look at the 1505 — Drone Days Join Facebook https://www.facebook.com/groups/680142485472890/

Alta velocidad en el bosque | Drone de carreras, vuelo FPV
Un ambiente muy distinto para hacer carreras, o volar un drone, espacios muy pequeños …

Parking FPV Session – Drone Racing
Hyper X quad, You can order it at: http://www.dronexlabs.com/ Powered by SLS LiPos! http://sls-spain.com …

My FPV Drone Racing 1
Моё первое Дрон-рейсинг видео. Не судите строго, смонтировал чтобы было с чем сравнить в …

drocon Bugs 3
Created by InShot:https://inshotapp.com/share/youtube.html https://www.amazon.com/dp/B06XTNS8HF/ref=cm_sw_r_cp_apa_fabt1_-pHPFb0WS3G4B https://www.amazon.com/Blomiky-C5810-Camera-Brushless-Quadcopter/dp/B07FCBZMD1/ref=sr_1_1?dchild=1&keywords=c5810+camera&qid=1604792150&sr=8-1

DJI Mini 2, mon analyse
Quelles sont les performances de la caméra ? Quelles sont les améliorations ? Quelle …
{kind=link}