
Laboratory of Autonomous Robotics Research (LARR) in Seoul National University is conducting research on actively controlling the position of the center of mass (CoM) of the Quadcopter to generate the high attitude control torque required for improving the agility of the platform’s translational motion.
During our research, however, we have recently learned that CoM location control can completely replace the contribution of a particular motor to the quadrotor’s attitude control.
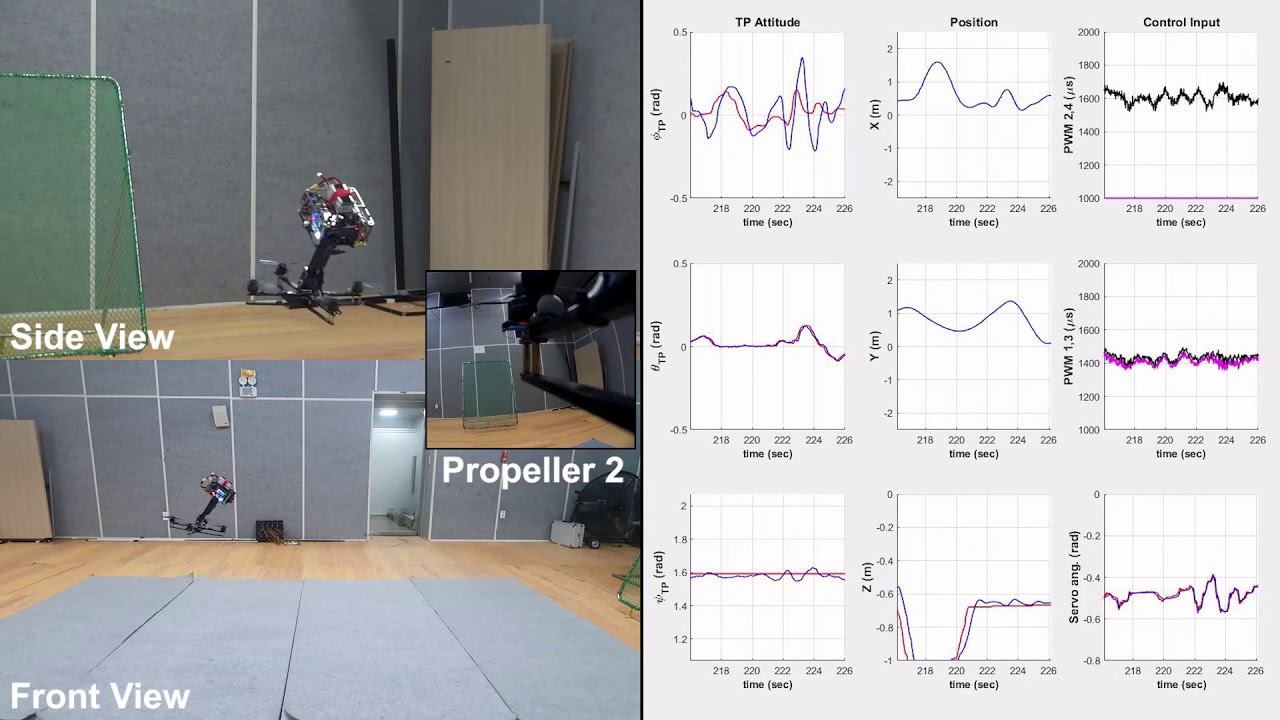
The video shows an experimental result of fail-safe flight in a single motor failure condition, where we can restore all four control inputs (roll, pitch, yaw, thrust) of the multirotor by utilizing the CoM control.
Related Posts

Cinematic FPV – Cliff Diving +Tree Run
A little edit from last week flying my new iFlight Nazgul 5. This was …

JJRC H36 4CH 6 Axis Gyro RC Quadcopter – Gearbest.com
Product link (buy here): http://gbe.st/M4VGS2 ▶ 【Ultimate Deal Coupon】: http://gbe.st/nPDEzX 【SEP10%OFF】 ▶ 【Best Tablet …

Drone Flying in the City of Copenhagen
Made this video about Drone Flying In The City Of Copenhagen when I had …


High altitude flying at sunset with my Potensic FPV drone
All footage was taken at dusk with my Potensic Navigator drone. The last scene …

Swiss Drone League – Tour 2019 – Race 4 – Verkehrshaus Luzern – Qualifications Finals
Das vierte Rennen der Swiss Drone League Tour 2019, ist in Luzern in dem …
{kind=link}