
Paper link: http://groups.csail.mit.edu/robotics-center/public_papers/Florence17.pdf
Code (open source): https://github.com/peteflorence/nanomap_ros
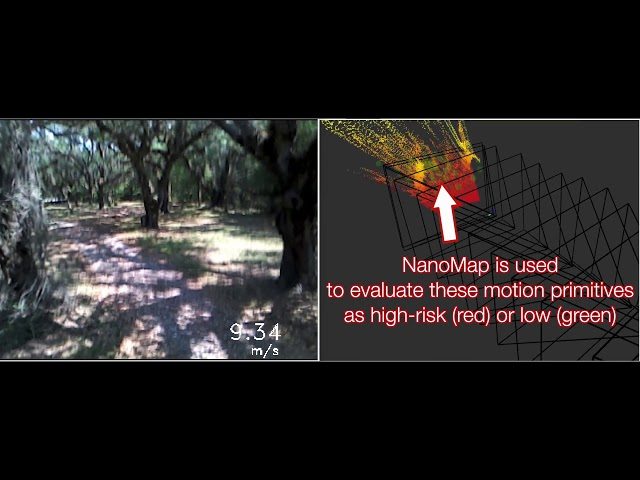
Abstract: We would like robots to be able to safely navigate at high speed, efficiently use local 3D information, and robustly plan motions that consider pose uncertainty of measurements in a local map structure. This is hard to do with previously existing mapping approaches, like occupancy grids, that are focused on incrementally fusing 3D data into a common world frame. In particular, both their fragile sensitivity to state estimation errors and computational cost can be limiting. We develop an alternative framework, NanoMap, which alleviates the need for global map fusion and enables a motion planner to efficiently query pose-uncertainty-aware local 3D geometric information. The key idea of NanoMap is to store a history of noisy relative pose transforms and search over a corresponding set of depth sensor measurements for the minimum-uncertainty view of a queried point in space. This approach affords a variety of capabilities not offered by traditional mapping techniques: (a) the pose uncertainty associated with 3D data can be incorporated in motion planning, (b) poses can be updated (i.e., from loop closures) with minimal computational effort, and (c) 3D data can be fused lazily for the purpose of planning. We provide an open-source implementation of NanoMap, and analyze its capabilities and computational efficiency in simulation experiments. Finally, we demonstrate in hardware its effectiveness for fast 3D obstacle avoidance onboard a quadrotor flying up to 10 m/s.
Related Posts
")
Insta360 GO FPV Drone (NEW PERSPECTIVE)


Qu8k – BALLS 20 – Carmack Prize Attempt – High Altitude Rocket On-board Video

GoolRC T47 FPV Drone Foldable with Wifi Camera Live Video Review

MICRO BRUSHLESS FPV DRONE RACE 2017 FITNATION AXA MANDIRI

{kind=link}
“Holy cow batman!” This is just flat amazing! Keep free thinking RLG.