
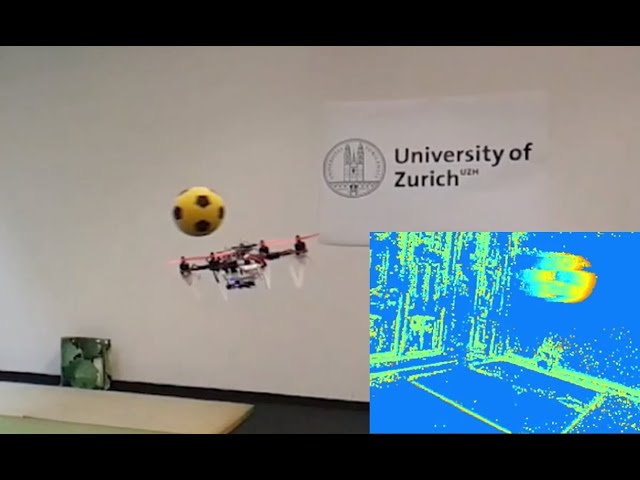
In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through an unknown cluttered environment. We provide a general analysis that can serve as a baseline for future quantitative reasoning for design trade-offs in autonomous robot navigation. We consider the case where the robot is modeled as a linear second-order system with bounded input and navigates through static obstacles. Also, we focus on a scenario where the robot wants to reach a target destination in as little time as possible, and therefore cannot change its longitudinal velocity to avoid obstacles. We show how the maximum latency that the robot can tolerate to guarantee safety is related to the desired speed, the range of its sensing pipeline, and the actuation limitations of the platform (i.e., the maximum acceleration it can produce). As a particular case study, we compare monocular and stereo frame-based cameras against novel, low-latency sensors, such as event cameras, in the case of quadrotor flight. To validate our analysis, we conduct experiments on a quadrotor platform equipped with an event camera to detect and avoid obstacles thrown towards the robot. To the best of our knowledge, this is the first theoretical work in which perception and actuation limitations are jointly considered to study the performance of a robotic platform in high-speed navigation.
Reference:
D. Falanga, S. Kim, D. Scaramuzza, “How Fast is Too Fast? The Role of Perception Latency in High-Speed Sense and Avoid”, IEEE Robotics and Automation Letters (RA-L), 2019.
PDF: http://rpg.ifi.uzh.ch/docs/RAL19_Falanga.pdf
Our research pages:
Vision-based quadrotor navigation: http://rpg.ifi.uzh.ch/research_mav.html
Aggressive quadrotor flight: http://rpg.ifi.uzh.ch/aggressive_flight.html
Event-based vision: http://rpg.ifi.uzh.ch/research_dvs.html
Affiliations: D. Falanga, S. Kim and D. Scaramuzza are with the Robotics and Perception Group, Dept. of Informatics, University of Zurich, and Dept. of Neuroinformatics, University of Zurich and ETH Zurich, Switzerland http://rpg.ifi.uzh.ch/
Related Posts

“daegu drone race world cup” 대구 드론 레이스 월드컵


Mini H quadcopter speed test



{kind=link}
shit
Is it just me, or the experimentors really suck at throwing?
Not hit from the beginning
Skynet likes this
Quadcopter isn’t smart, man crookedly throws
Quadcopter isn’t smart, man crookedly throws
Curious as to what the thinks mounted at the top of the walls are, are they cameras being used to track environment state? I see there is a little ball on the drone, something to do with that?
The Skynet is coming….
В мае 2019 года швейцарские исследователи из Цюрихского университета продемонстрировали миру оснащенный событийной камерой дрон, который уворачивался от мяча, летящего на скорости порядка 7.2 м/с. Событийная камера отличается тем, что ее кадры не возникают с присущей привычным камерам периодичностью, а появляются асинхронно, что и обеспечивает стремительную реакцию системы.
Беспилотники становятся по-настоящему беспилотными: с одной стороны, подход приближает нас к формированию воздушного логистического комплекса – с другой, заставляет задуматься о том, что в ближайшие годы аналогичные аппараты появятся и у злоумышленников. Мысли о том, что аппарат, целеустремленно рвущийся к турбине заходящего на посадку пассажирского лайнера, сможет уклоняться от разнородных противодронных вооружений, вызывает понятные опасения.
Slaughterbots.
A pain in the ass for airports.
What happens if you just try to slap the shit out of it?
other direction??