
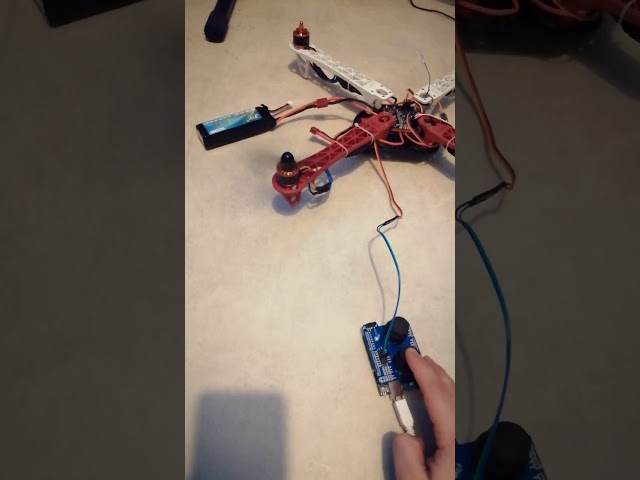
Ok lets try with new code and propeller.
U can see there is two batteries in quad, what happens if i take some weight out of this quad??
Maybe u should check upcoming experiment 1.2… maybe it time change x-axis to y?
—————
First brushless motor test was here from this serie:
https://www.youtube.com/watch?v=wGFhDo_mSsk
Related Posts

Hubsan H107P X4 Plus Quadcopter review – Small and cheap quadcopter test
http://goo.gl/t1d2Rb By it cheap from GearBest.com Hubsan X4 Quadcopter Item No.H107P Frequency: 2.4GHz Channel:4CH …


Snaptain SP650 RC Quadcopter Drone TEST Review
BAM Great Flyer – https://amzn.to/2O5Xk4s Tenker 4k used as hat cam https://amzn.to/2Lz4tc5 #drone #rc …

S9w drone | Best RC Drone unboxing testing | High flying rc drone| 2.4GHz 6Ch RC Drone | Play4u
Hello friends, Today I have S9w Best RC Drone video for you . Now …


{kind=link}
Code: #include // always use safety glasses if something starts to fly 😉
Servo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
val = analogRead(potpin); //
val = map(val, 0, 1900, 0, 180); // why 1900? Servo stopped 1832, but it seem to give some energy to quad so i put this for to know energy rate is low
myservo.write(val); // sets the servo position according to the scaled value
delay(1); // waits for the servo to get there
}
Rule number one- take your prpos off .haha
Props off when testing, especially indoors
You might think about using longer wires.