
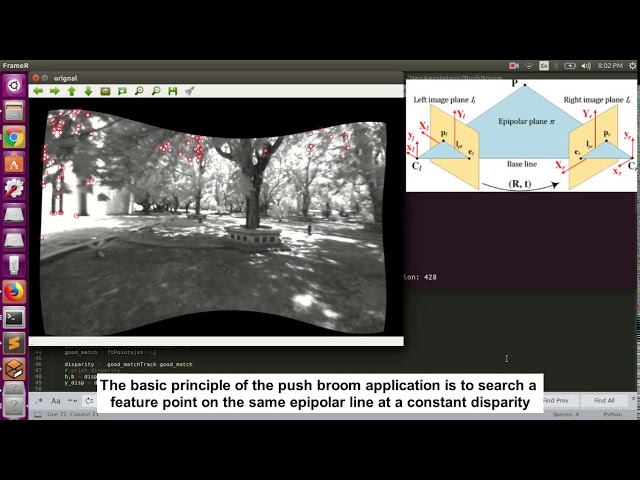
This video briefly explains my implementation of the Push Broom algorithm, which is one of the most advantageous algorithms for obstacle avoidance in high speed flying robots. This algorithm makes use of a stereo camera to search obstacle at the constant disparity. It is very fast as it does not triangulate on all the feature points. I have used LK tracker to track and find the features in subsequent frames.
Reference :- https://arxiv.org/abs/1407.7091
Related Posts

JJRC H8C Quadcopter Drone — Hi Altitude Flight 400+
JJRC H8C equipped with 1080p HD camera. Early evening flight. Distance is 400+ . …

Drone Quadcopter TKKJ TK 117 Dark Pro Wifi Altitude Hold – Test Flight 1
Pingin Beli Drone professional dengan harga miring? Disini nih: Drone TK117 https://www.bukalapak.com/p/kamera/drone/drone-unit/m0d7h8-jual-drone-quadcopter-tkkj-tk-117-tk-117-dark-pro-gesture-selfie-control-mirip-dji-mavic-pro-syma-x5hw?keyword= https://www.tokopedia.com/majulaku/drone-quadcopter-tkkj-tk-117-dark-pro-mirip-dji-mavic-pro-syma-x5hw?trkid=f=Ca0000L000P0W0S0Sh00Co0Po0Fr0Cb0_src=shop-product_page=1_ob=11_q=DRONE_catid=2330_po=13 https://shopee.co.id/Drone-Quadcopter-TK-117-TK117-Dark-Pro-Gesture-Selfie-Altitude-Hold-Optical-Flow-DJI-Mavic-Syma-X5HW-i.86681009.1474064365 …

DJI Spark High Wind Speed Test ?
Watch what happens if you fly a DJI Spark Drone (https://goo.gl/9RJ3WQ) in high wind …

6S is the new 4S | HYPE OR TRUTH
Uncertain about what to buy? Check out THE ULTIMATE FPV SHOPPING LIST: https://www.fpvknowitall.com/ultimate-fpv-shopping-list THIS …

Best Renderer Corona renderer 1.6 +setting+download
Bedroom Design Visualization process from start to finish using 3ds max and Corona The …

Selling my Yamaha R1 for a Panigale V4 | Yamaha vs Ducati | Los Angeles 11 | Tall Guy Car Reviews
#FastLaneD #FastLaneGang For REAL TIME updates follow me on Instagram! (@FastLaneD_) Instagram: https://www.instagram.com/fastlaned_ In …
{kind=link}